电 话:13919318118
邮 箱:1214656522@@qq.com
网 址:www.yaohange.cn
地 址:甘肃省兰州市七里河区西津西路239号机电物流中心86-128号
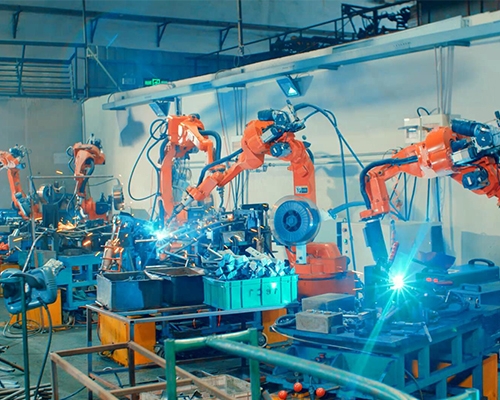
焊接机器人是从事焊接的工业机器人。依据国际规范化组织工业机器人属于规范焊接机器人的定义,工业机器人是一种多用处的、可反复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化范畴。为了顺应不同的用处,机器人一个轴的机械接口,通常是一个衔接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能停止焊接,切割或热喷涂。

焊接机器人主要包括机器人和焊接设备两局部。机器人由机器人本体和控制柜组成。以焊接设备为例,弧焊和点焊由焊接电源、送丝机和焊枪组成。关于智能机器人,还应该有传感器系统,如激光或摄像头传感器及其控制。
普遍缺点及解决方案
1.出現焊偏很有可能为电焊焊接的部位有误或焊机找寻时出現难题。这时候,要考虑到TCP(焊机定位点部位)是不是精准,并多方面调节。假如经常出現这类状况就需要检查一下智能机器人各轴的零部位,再次校零给予调整。
2.出現错口很有可能为电焊焊接主要参数挑选不善、焊机视角或焊机部位不对,可适度调节输出功率的尺寸来更改电焊焊接主要参数,调节焊机的姿势及其焊机与产品工件的相对位置。
3.出現出气孔很有可能为汽体维护差、产品工件的面漆太厚或是保护气不足干躁,开展相对的调节就可以解决。
4.溅出过多很有可能为电焊焊接主要参数挑选不善、汽体成分缘故或焊条外伸长短过长,可适度调节输出功率的尺寸来更改电焊焊接主要参数,调整汽体配制仪来调节混合气占比,调节焊机与产品工件的相对位置。
5.焊接结尾制冷后产生一弧坑,程序编写时在工作中步中加上埋弧坑作用,能够将其铺满。

 甘公网安备 62010302000949号 服务支持:企源科技
甘公网安备 62010302000949号 服务支持:企源科技