电 话:13919318118
邮 箱:1214656522@@qq.com
网 址:www.yaohange.cn
地 址:甘肃省兰州市七里河区西津西路239号机电物流中心86-128号
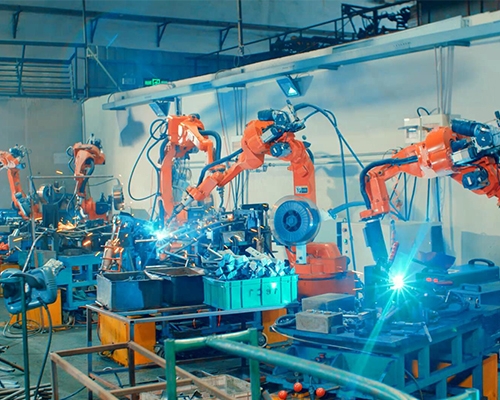
伴随着科学研究幅度的大力加强,机器人的技术实力也越来越愈来愈强,从自动化技术发展趋向看,焊接机器人和其他工业机械手一样,一样全是向着智能化系统和多元化方位发展趋势。实际能够从哪几个方面看得出焊接机器人有那样的发展趋向呢?

首先,是焊接机器人实际操作组织层面的转变,根据有限元、模态分析及模拟仿真设计方案等现钱设计方法的应用,逐渐完成了机器人实际操作组织的可靠性设计。比较显著的便是高韧性质轻原材料的应用,进一步提高了焊接机器人实际操作组织的负荷和自身重量比。
另外,在焊接机器人生产厂家选用了优质的RV减速器及沟通交流交流伺服电机,使机器人操作机基本上变成免维护保养系统软件;并促进其组织向模块化设计、可重新构建的方位发展趋势,促使焊接机器人的构造更为机敏,自动控制系统越来越小。
其次,便是焊接机器人的自动控制系统,为了更好地有利于完成规范化和数字化,关键刚开始科学研究敞开式、模块化设计自动控制系统。那样的话,不但能够进一步提高了系统软件的可信性、易可操作性和可维修性,还能完成了手机软件伺服电机和全计算机控制。
在焊接机器人传感器技术层面也反映出了智能化系统和多元化,一些焊接机器人中除选用传统式的部位、速率、瞬时速度等感应器外,还运用了激光传感器、机器视觉系统和力传感器,并完成了焊接全自动追踪和自动化技术生产流水线物件的全自动精准定位及其高精密安装工作等,进一步提高了机器人的工作特性和对自然环境的适应能力。

此外,兰州焊接机器人的通信网络作用、遥控器和监控技术、虚拟化技术、多智能体管控技术性及其特性价格对比都会慢慢产生变化,技术性已经迅速的升级、升級,这全是为了更好地越变就越好,务求可以促使焊接机器人考虑各种各样场所的要求。
 甘公网安备 62010302000949号 服务支持:企源科技
甘公网安备 62010302000949号 服务支持:企源科技