电 话:13919318118
邮 箱:1214656522@@qq.com
网 址:www.yaohange.cn
地 址:甘肃省兰州市七里河区西津西路239号机电物流中心86-128号
尽量在自动焊接机器人安裝的两侧安裝防护栏,阻拦无关紧要的工作人员挨近;在实际操作焊接机器人的情况下,工作员还要配戴好防护用品;起动按键设定在机器人的安全性部位,避免留有安全风险。在开展焊接全过程中,只必须开展定位点操纵,而电焊钳在点与点中间的挪动运动轨迹沒有严格管理。更是由于这般,自动焊接机器人不但要有充足的负荷工作能力,并且在点与点中间挪动时速率要便捷,姿势要稳定,精准定位要精准,以减少挪动的時间,提升工作效能。

针对自动焊接机器人必须有多大的负荷工作能力,非常大水平上在于常用的电焊钳方式,一般 针对用与变电器分离出来的电焊钳,30~45kg负荷的机器人充足了。可是,这类电焊钳一方面因为二次电缆长,电磁能耗损大,也不利机器人将电焊钳伸进产品工件內部电焊焊接;另一方面电缆随机器人健身运动而不断晃动,电缆线的毁坏较快。因而,现阶段早已逐渐换成一体式电焊钳。
说白了,为了避免环境要素对焊接机器人导致负面影响,增加其使用寿命,自动焊接机器人生产厂家提醒尽量将焊接机器人安裝在防水干躁、灰尘少的地区。而且规定控制箱和悍机尽量也与路面维持一段距离。
自动焊接机器人安裝进行以后,有关它的安全性防护措施也是必需的,自身将机器人取代人力的目地是为了迅速的做些反复姿势,而在健身运动全过程中是假如有些人挨近得话,很可能导致重特大的安全生产事故。
这类电焊钳连在变电器品质在70kg上下,充分考虑机器人要有充足的负荷工作能力,能以很大的瞬时速度将电焊钳送至室内空间部位开展电焊焊接,一般都采用100~155kg负荷的超重型机器人。
当人们初次应用焊接机器人的情况下,是否应当加多留意呢?例如要挑选好焊接机器人的安裝部位。焊接机器人中包括了许多精密加工的构件,尤其是它的控制箱,尽管干了非常好的防污解决,但安裝地点的自然环境很差也会减少机器人的使用寿命。
相对性于别的焊接方法而言,焊接技术性算作规定较为低的了,因此它对常用机器人的规定也不会很高。就算是这般,大家也得清晰把握点焊接机器人的基本要素。
一般状况下,自动焊接机器人在原厂前都早已对它的起点部位开展过校正,但即使如此也要在安裝机器人时做重心点部位精准测量及专用工具部位检测。这一步实际操作非常简单,只必须在焊接机器人的设定里边寻找莱单,一步步的按提醒实际操作就行了。

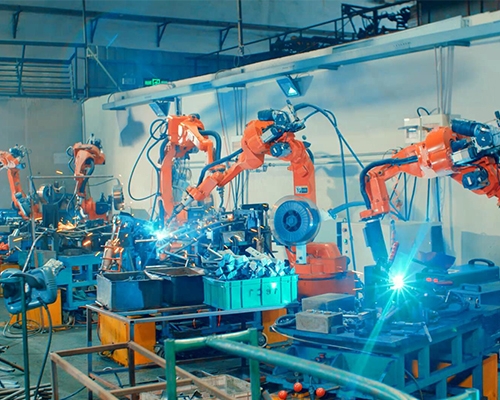
在工业机器人运用愈来愈普遍,基本上全部的制造行业都会考虑到选用机器人取代人力,也包含了电焊焊接制造行业。自动焊接机器人跟全部工业机器人一样,也全是由机器人本身、控制箱及步态分析开发板等主要一部分组成的,仅仅焊接机器人还必须配电焊焊接开关电源、送丝设备及焊机装置等。
 甘公网安备 62010302000949号 服务支持:企源科技
甘公网安备 62010302000949号 服务支持:企源科技