电 话:13919318118
邮 箱:1214656522@@qq.com
网 址:www.yaohange.cn
地 址:甘肃省兰州市七里河区西津西路239号机电物流中心86-128号
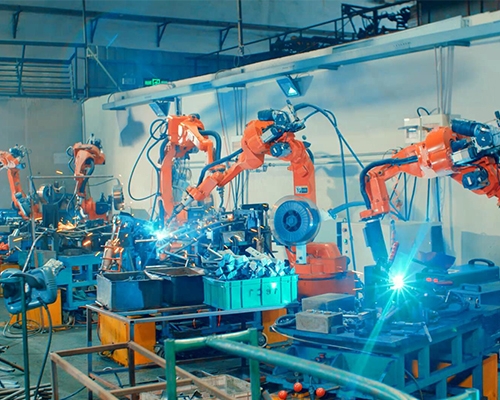
机器人焊接开始只在焊接中获得运用,80年初,伴随着电子信息技术、传感技术的发展趋势,焊接机器人慢慢获得普及化,非常是近十几年来因为全球范畴内经济发展的髙速发展趋势,销售市场的猛烈市场竞争使这些用以中、批量生产的电焊焊接自动化技术私人飞机已不可以融入小规模纳税人、多种类的生产模式慢慢被具备软性的机器人焊接替代,机器人焊接获得了极大的发展趋势,电焊焊接已变成工业机械手运用较大的行业之一,机器人焊接在轿车、摩托、工程机械设备等行业都获得了普遍的运用。现阶段全球有着的80多万台工业机械手中,用以电焊焊接的智能机器人达到40%之上。

焊接机器人时的关键常见问题
1.务必开展步态分析工作
在智能机器人开展自动焊接前,实际操作工作人员务必步态分析智能机器人焊机的运动轨迹和设置电焊焊接标准等。
因为务必步态分析,因此智能机器人不朝向多种类小量生产制造的商品电焊焊接。
2.务必保证产品工件的精密度
智能机器人沒有双眼,只有反复同样的姿势。
智能机器人运动轨迹精密度为±0.毫米,为此精密度反复同样的姿势。
电焊焊接误差超过焊条半经时,有可能电焊焊接不太好,因此产品工件精密度应维持在焊条半经以内。
3.电焊焊接标准的设置在于步态分析工作工作人员的技术实力
实际操作工作人员开展步态分析时务必键入电焊焊接程序流程,焊机姿势和视角,电流量、工作电压、速率等电焊焊接标准。
步态分析实际操作工作人员务必充足把握电焊焊接专业知识和焊接技巧。
4.务必充足安全提示
智能机器人是一种髙速的运动装备,在其开展自启动时肯定不允许人挨近智能机器人(务必设定安全护栏)。
实际操作工作人员务必接纳劳动者安全性层面的专业文化教育,不然禁止实际操作。
焊接机器人的特性规定
在氩弧焊工作中,规定焊机追踪产品工件焊缝健身运动,并持续添充金属材料产生焊接,因而健身运动全过程中速率的可靠性和路轨精密度是二项关键的指标值。
一般状况下,电焊焊接速率可用5~50毫米/s,路轨精密度可用±0·2~0·5毫米。因为焊机的姿势对焊接品质也是有一定的危害,因而期待在根踪焊缝的另外,焊机姿势的可调式范畴尽可能大,也有其他一些特性规定,如晃动作用、电焊焊接感应器(起止点检验、焊接追踪)的插口作用、焊机防碰作用等。
电焊焊接标准的设置。起弧、收弧主要参数。
晃动作用。晃动頻率、摆幅、晃动种类的设置。
电焊焊接感应器。起止点检验、焊接追踪感应器的插口作用。
焊机防碰作用。当焊机遭受异常的摩擦阻力时,智能机器人关机,防止作业者和专用工具遭受毁坏。
双层焊作用。运用该作用能够在第1层电焊焊接步态分析进行后,完成其他各层的数控编程软件。
再引弧作用。引弧不成功后,全自动再试。因而清除了电焊焊接出现异常(引弧不成功)产生时造成的工作终断,很大限度防止了因而而造成的全程泊车。
焊机校准作用。焊机与产品工件产生撞击时,可根据简易实际操作开展校准。
粘丝全自动消除作用。电焊焊接终结时假如检验出焊条粘丝,则全自动再接电源消除粘丝,因而无须手工制作弄断焊条。
断弧重新启动作用。出現断弧时,智能机器人会依照特定的钢筋搭接量回到再次引弧电焊焊接。因而不必焊补工作。

焊接智能机器人的特性规定
针对焊接智能机器人健身运动速率是一个关键指标值,规定可以迅速进行小标题距的多一点精准定位(比如每0.3-0.4秒挪动30-50毫米节径后精准定位);为保证电焊焊接品质,精度等级规定较高(一般为±0·25mm);并具备很大的持重(50~100Kg),便于带上内装变电器的电焊钳。
 甘公网安备 62010302000949号 服务支持:企源科技
甘公网安备 62010302000949号 服务支持:企源科技